Turning ADAS validation, simulation, and safety into reliable engineering outcomes.
I design, integrate, and validate advanced driver assistance systems with a focus on model-based development, simulation workflows, sensor integration, SIL/HIL validation, and Python-based engineering tools. My work bridges virtual testing and real-world vehicle data to support safer, smarter, and more reliable automotive systems.
Engineering with validation, clarity, and purpose
I am an ADAS Systems Engineer specializing in model-based design, validation, simulation-driven development, and automotive software-enabled testing. My experience spans ACC, LKA, AEB, sensor fusion, ECU diagnostics, SIL/HIL workflows, and standards-aligned verification using tools such as MATLAB/Simulink, RoadRunner, ROS, CANoe, CANalyzer, CANape, and Python.
Engineering Focus
I work on advanced driver assistance systems across feature development, ECU integration, validation workflows, and safety-oriented engineering for Level 2 and Level 3 vehicle programs.
Simulation & Tooling
My workflow combines MATLAB/Simulink, RoadRunner, ROS, Unreal-connected simulation, and Python/Qt engineering tools to support scenario-based testing, debugging, and data-driven feature analysis.
Validation & Diagnostics
I use SIL/HIL methods, CAN-based diagnostics, MF4/BLF data analysis, root-cause investigation, and standards-aligned test practices to improve reliability, traceability, and real-world ADAS performance.
Recent roles across ADAS, validation, and tooling
A summary of my recent work across ADAS development, simulation, diagnostics, and engineering tool creation.
ADAS Systems Engineer II
- Led design, development, and validation of ADAS features including ACC, ALCA, and LKA using MATLAB/Simulink from concept through verification.
- Built high-fidelity virtual validation environments using MathWorks RoadRunner, HD maps, vehicle dynamics, and sensor models to evaluate feature behavior across realistic traffic scenarios.
- Integrated Unreal-connected simulation workflows to improve photorealistic visualization, closed-loop test coverage, and control tuning efficiency.
- Designed and developed a Python/Qt-based Overhead ACC Viewer for synchronized playback of video, CAN waveforms, and bird’s-eye vehicle motion from real-world test data.
- Implemented MF4 and BLF log decoding using ASAMMDF and open-DBC to extract critical ACC and lane-related signals for debugging, analysis, and reporting.
- Performed root-cause analysis for LKAS, ELK, LDW, and ACC issues by correlating sensor inputs, ECU behavior, calibration, control logic, vehicle dynamics, and environmental conditions.
ADAS Engineer
- Supported embedded C/C++ and ROS-based ADAS software integration in embedded Linux environments to build reliable sensor and controller software units.
- Modeled, simulated, and verified perception and control algorithms using MATLAB/Simulink with MIL, SIL, and HIL workflows, including scenario-based validation in CarMaker.
- Used CANoe, CANalyzer, CANape, CDA, and related tools for ECU diagnostics, network analysis, calibration, troubleshooting, and continuous reliability improvement.
- Designed and executed DVP test cases for ADAS features in alignment with EURO NCAP, NHTSA, and ISO-related standards and validation requirements.
- Supported radar, LiDAR, camera, and ultrasonic sensor integration while improving feature performance for ACC, AEB, LKA, and related ADAS functions.
- Performed deep data logging, Python-based investigations, and CAN traffic analysis to support defect resolution, documentation, and Level 3 autonomous-driving programs.
Autonomous Technologies Intern
- Developed throttle and steering control logic for obstacle avoidance and Adaptive Cruise Control using MATLAB/Simulink and model-based design workflows.
- Built ROS-based stereo camera and radar sensor-fusion modules to publish chassis control commands with deterministic timing and validation-focused architecture.
- Decoded CAN bus messages from radar, IMU, GPS, and OBD-II sources using Python and C/C++, with diagnostics and analysis support using CANalyzer and CANape.
- Planned and executed controller validation across MIL, SIL, and HIL setups, including closed-loop scenarios, KPI evaluation, and defect triage.
- Implemented and calibrated electronic throttle and engine speed control systems using Simulink, MotoHawk, and MotoTune.
- Supported Level 2 Ford ADAS road testing for Mach-E and F-150 programs, including route execution, data logging, and issue reporting across varied U.S. driving conditions.
Featured engineering work
Selected work that best represents my ADAS, simulation, and engineering tool development experience.

Overhead ACC Viewer
Built a Python/Qt application to review ADAS test data by synchronizing video playback, CAN waveforms, and top-down vehicle and lane animations. Added support for MF4 and BLF decoding to improve analysis of ACC-related signals.
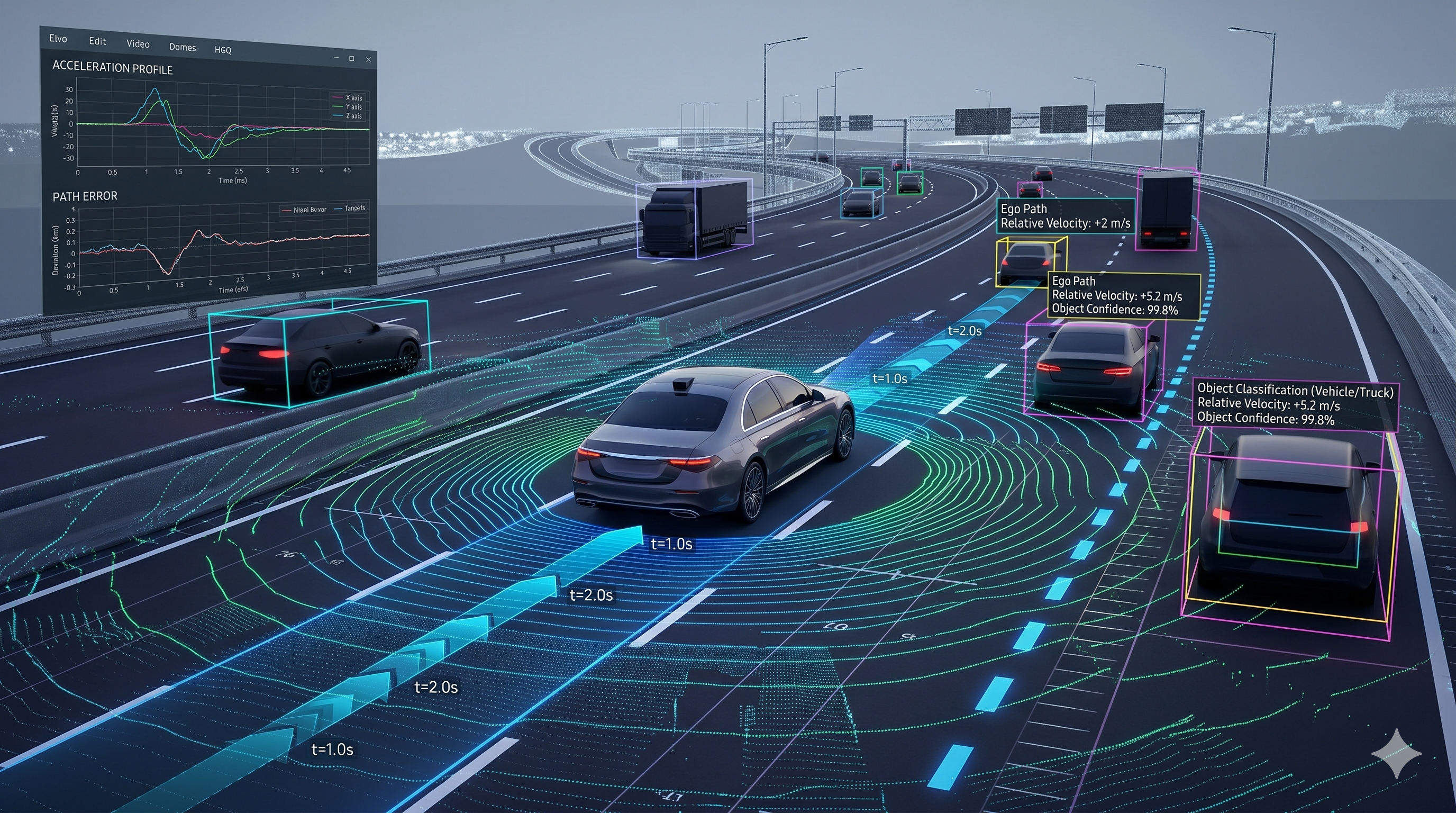
Virtual ADAS Validation Environment
Developed and validated control logic for features such as ACC and LKA using MATLAB, Simulink, RoadRunner, and Unreal-connected simulation workflows to test performance in realistic virtual traffic environments.
ADAS Sensor & ECU Validation
Supported integration, diagnostics, and performance testing of ADAS ECUs and sensors including radar, LiDAR, cameras, and ultrasonic systems using structured validation workflows and CAN-based diagnostic tools.
Tools I use across development and validation
A focused snapshot of the platforms, tools, and engineering domains I use across ADAS feature development, validation, simulation, diagnostics, and software-enabled testing.
ADAS, Safety & Validation
ACC, LKA, AEB, ALCA, LDW, ELK, ADAS Testing (L0–L3), DVP execution, MIL / SIL / HIL validation, Functional Safety, ISO 26262, FMVSS 127, EURO NCAP, NHTSA, KPI-based verification
Model-Based Design & Simulation
MATLAB, Simulink, MathWorks RoadRunner, CarMaker, ROS, Unreal-connected simulation workflows, vehicle control logic, scenario-based validation, HD-map and sensor-model integration
Diagnostics, Data & Test Tools
CANoe, CANalyzer, CANape, CDA, ViCANdo, Chrysler Diagnostic Application(CDA), Kvaser CAN, AB Dynamics (SR, BR, AR, Launch Pad 80 and Guided Soft Target(GST)), MF4 / BLF decoding, ASAMMDF, open-DBC, data logging, root-cause analysis, signal correlation and event review
Programming & Engineering Software
Python, Python-can, MF4 Reader, C/C++, PyQt / PySide, OpenCV, openpyxl, embedded Linux, MATLAB App Designer, MotoHawk, MotoTune, SolidWorks, HyperMesh, ANSYS
Certifications, training, and academic foundation
Professional training and academic experience that support my work across ADAS validation, simulation, diagnostics, controls, and automotive engineering.
Certifications & Technical Training
- ISO 26262 Functional Safety Training
- AB Dynamics Guided Soft Target (GST) Training
- Autonomous Pedestrian Target System Training
- Steering Robot & Combined Brake and Accelerator Robot (CBAR) System Training
- Certified SolidWorks Associate (CSWA)
- Certified SolidWorks Professional (CSWP)
Education
- Master of Science in Mechanical Engineering — Fairfield University, Connecticut
- Bachelor of Science in Mechanical Engineering — JNTUH, Hyderabad, India
Academic training in mechanical systems, controls, robotics, and engineering analysis that continues to support my work in ADAS, validation, and model-based development.
Let’s connect
I’m open to ADAS engineering opportunities, technical collaboration, and conversations around validation, simulation, functional safety, and automotive software-enabled testing.
sunnyrajmohan16@gmail.com
Connect with me professionally and explore more of my engineering background.
Resume
Download my latest resume for a detailed view of my ADAS, validation, and simulation experience.